Полет на дроне — это захватывающее зрелище! Острые ощущения, когда вы пролетаете над эпическими местами, полностью погрузившись в вид пилота, трудно превзойти. Многие люди стремятся освоить это занятие, но часто не знают, как построить дрон и с чего начать. Самым большим препятствием для многих является приобретение своего первого дрона, поэтому многие любители предпочитают построить свой собственный.

Создание собственного дрона может показаться пугающей задачей, как это было со мной, и нужно просмотреть горы информации, прежде чем что-то начнет иметь смысл. К счастью, это не так сложно, как кажется, и с небольшим руководством вы быстро подниметесь в воздух, приобретя при этом некоторые практические навыки! Поначалу эта идея может показаться пугающей, но я твердо убежден, что любой человек, вооруженный правильной информацией, сможет приступить к работе и сделать это относительно без проблем.
Небольшая заметка о беспилотниках RTF
Частый вопрос, который я часто слышу: «Зачем мне строить свой собственный дрон, когда есть столько отличных вариантов RTF (ready to fly) и BNF (bind n fly)?».
Многие видели такие продукты, как iFlight Nazgul и Emax Hawk, которые, безусловно, являются отличными дронами за ту цену, которую вы платите. Проблема в том, что в этом хобби вы будете разбиваться, и когда я говорю «разбиваться», я имею в виду много! Обычно за одну сессию я разбиваюсь около десяти раз и часто сталкиваюсь с необходимостью чинить свой дрон, чтобы вернуться в воздух.
Квадрокоптер BNF

Рекомендуемый беспилотник BNF — iFlight Nazgul 5
Сочетание высокой производительности, отличной динамики полета и простоты настройки делают Nazgul самым простым путем к конкурентоспособному гоночному дрону FPV.
BetaFPV CetusPro RTF Kit или Nazgul 5 — отличные начальные дроны, которые научат вас многому в хобби. Если вы из тех, кто просто хочет подняться в воздух и полетать, или у вас просто нет времени на постройку, то вот несколько замечательных вариантов, которые мы рассмотрим в нашей статье Топ RTF дронов.
Квадрокоптер RTF

Рекомендуемый RTF дрон — BETAFPV Cetus Pro
CetusPro — один из самых крутых бюджетных дронов. Его характеристики подходят для начинающих.
Несмотря на то, что эти BNF-конфигурации великолепны, пропустив часть сборки, вам будет гораздо труднее диагностировать проблему и гораздо труднее установить новые детали. Если вы полностью понимаете свою сборку, вы часто сможете без проблем исправить ее и, вероятно, догадаться, что именно вышло из строя.
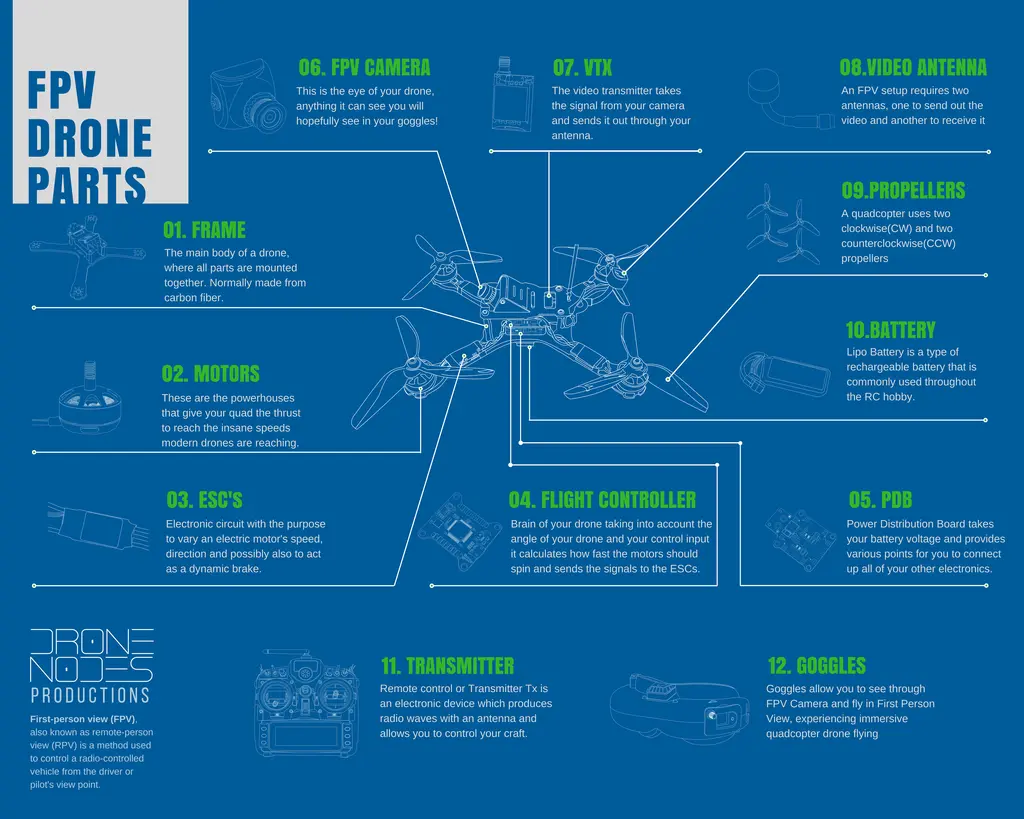
АНАТОМИЯ ДРОНА
Инфографика, представляющая основные части квадрокоптера, которые понадобятся для создания fpv дрона. Мы рассмотрим каждую деталь и объясним ее основные функции. Нажмите на изображение, чтобы увеличить его!
ОСНОВНЫЕ НЕОБХОДИМЫЕ ИНСТРУМЕНТЫ
В начале работы вы можете обойтись лишь несколькими основными инструментами. В этом списке представлен необходимый минимум. Наш набор инструментов для дронов включает в себя все необходимые инструменты, которые значительно облегчат процесс!
Инструменты
- Набор шестигранных ключей или драйверов (размеры зависят от выбранной вами рамы)
- Гаечный ключ M5 (8 мм) или трещотка
- Паяльник и припой
- Кусачки/стрипперы
Дополнительные насадки и приспособления
- Кабельные стяжки
- Термоусадка
- Стояки
- Электрическая лента
- Двусторонний скотч
- Фиксатор резьбы (Loctite)
КАКОЙ ТИП ДРОНА МНЕ СЛЕДУЕТ ПОСТРОИТЬ?
Возможно, вы уже начали поиск деталей и обнаружили, что они могут быть самых разных форм и размеров. Лучше всего классифицировать их по размеру реквизита следующим образом:

2” Class Build
Как правило, очень маленькие и подходят для использования в помещении. Они отлично подходят для тренировок дома или в плохую погоду! Эти маленькие ракеты становятся все более популярными, а некоторые из них могут развивать скорость до 100 миль в час!

Пример сборки класса 2″ — GEPRC ROCKET Lite 2″
Rocket — это флагманский бесщеточный микродрон от GEPRC, относящийся к категории 100 мм. Он обладает мощными характеристиками, подробности смотрите по ссылке.
3-4” Micro Class Build
Самый маленький полноразмерный беспилотник, на котором действительно стоит летать на открытом воздухе. Они летают очень похоже на своих более крупных собратьев и являются идеальным вариантом для ограниченного пространства. Ознакомьтесь с нашим подробным руководством по микро-дронам.

Пример класса «4» — iFlight Chimera4
Этот 4″ дальнобойный аппарат может находиться в воздухе до 15 минут при использовании как минимум 4S 850mAh. Он оснащен камерой Nano 2, GPS, 1404 моторами.
5” Mini Class Build
Самый распространенный тип гоночных/фристайл дронов. Их часто называют самыми универсальными, поскольку они обладают большой мощностью, невероятной маневренностью и способны нести HD-камеру, такую как GoPro, без существенного ущерба для летных характеристик. Девяносто процентов мини квадрокоптеров, существующих на данный момент, соответствуют этой категории. Из различных конфигураций вы можете проверить рекомендуемые комплекты гоночных дронов, которые мы использовали и тестировали.

6” Mini Class Build
Более дальнобойный и эффективный вариант, отлично подходит для тех, кто предпочитает крейсерскую скорость, а не гонку, и выполняет быстрые трюки, такие как сальто и перевороты. Этот размер часто используется в установках дальнего радиуса действия и применяется для полетов над живописными местами.

7+” Class Build
При таких размерах вы начинаете заниматься фото- и видеосъемкой. Эти дроны достаточно велики, чтобы нести камеру с системой стабилизации и использовать другие функции, такие как GPS, позволяющие им удерживать свое положение и даже автоматически возвращаться домой.

Они обычно летают в режиме самовыравнивания, в отличие от режима акро, используемого для небольших квадрокоптеров, и имеют более емкие батареи, позволяющие им летать гораздо дальше.
Надеюсь, это даст вам представление о том, какой размер вы хотите построить.
При выборе размера следует учитывать, что чем меньше размер, тем меньше пространства для работы при сборке. С другой стороны, квадрокоптер меньшего размера часто дешевле, а меньший вес снижает вероятность повреждения при аварии.
Я лично рекомендую для первого дрона 5″, так как они просты в сборке и обладают достаточной мощностью для подъема HD-камеры. Дрон 5″ также имеет самый доступный запас деталей, что означает, что все максимально дешево и легко достать.
Конечно, вам не обязательно ограничиваться одним дроном! Посмотрите на Стю из UAV futures стену из квадрокоптеров! На его канале YouTube вы найдете видео разбора и полета почти каждого дрона, чтобы помочь вам определиться с выбором.
ЗАПЧАСТИ ДЛЯ ДРОНОВ — ВЫБОР ПРАВИЛЬНЫХ КОМПОНЕНТОВ
Итак, теперь у вас есть представление о том, какой дрон вы хотели бы построить, следующий шаг — выбор подходящих компонентов. Каждая сборка будет отличаться от человека к человеку, но почти все сборки будут состоять из одних и тех же основных частей. Для каждого компонента я объясню, что он делает, какой выбор вам придется сделать и какой минимум характеристик вам следует искать.
Давайте погрузимся:
Рама для беспилотника
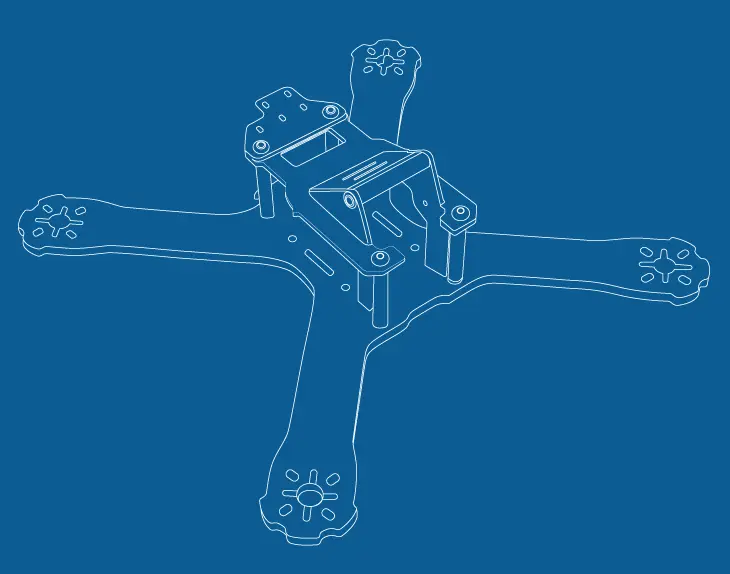
Это ваша отправная точка! Это основная часть вашей сборки, где вы монтируете все детали и собираете все вместе. Рамы обычно изготавливаются из углеродного волокна и собираются с помощью различных крепежных элементов, таких как стойки или алюминиевые секции. Они могут быть самых разных форм и размеров, мы подробно рассмотрели рамы квадрокоптеров в нашем руководстве.
Выбор, который вам придется сделать:
Гонщик или фристайлер? — Гоночные дроны обычно имеют минимальную раму, они легкие и проворные. Однако фристайл-дроны лучше летают с небольшим весом, поскольку это позволяет им сохранять динамику при выполнении различных трюков. Дрон для фристайла обычно требует большей защиты, так как часто летает выше и на более твердых поверхностях.
Батарея установлена сверху или снизу? — Это повлияет на центр тяжести, но может сделать батарею более уязвимой. Чем ближе к центру вы сможете сделать его, тем более плавно будет летать ваш дрон.
Есть ли место для крепления HD-камеры? — Если вы хотите нести ее, конечно! Гоночные дроны обычно предпочитают этого не делать из-за дополнительного веса. Для многих рам доступны 3D-печатные варианты.
Вам нужны сменные рычаги или цельная конструкция? Сменные кронштейны могут сократить время простоя, но при этом увеличивают вес.
Смогу ли я разместить все свои компоненты в этом пространстве? Есть ли место для установки всех компонентов, это может ограничить ваши возможности в дальнейшем.
Для рам размером 5″+ следует искать кронштейны толщиной не менее 4 мм, для 3″ — 4″ можно опуститься до 3 мм, а для 2″ — до 2,5 мм. Любые более тонкие кронштейны будут легко ломаться.
Для рам размером 5″+ следует искать кронштейны толщиной не менее 4 мм, для 3″ — 4″ можно опуститься до 3 мм, а для 2″ — до 2,5 мм. Любые более тонкие кронштейны будут легко ломаться.
Возможно, вы видели рамы, размеры которых определяются расстоянием от двигателя до двигателя, например, 220 мм. В следующей таблице приведены приблизительные данные о том, какие размеры следует искать.
| Размер | Размер грубой рамы | Минимальная толщина плеча |
| 2″ | 95мм | 2.5мм |
| 3″ | 130мм | 3мм |
| 4″ | 180мм | 3мм |
| 5″ | 220мм | 4мм |
| 6″ | 250мм | 4мм |
| 7″ | 300мм+ | 4мм |
Здесь есть над чем подумать! Если вы застряли или не уверены, посмотрите на пилотов, чей стиль пилотирования вам нравится, и узнайте, на чем они летают. У многих лучших пилотов есть видеоролики, в которых они объясняют ключевые моменты своих моделей и почему они выбрали именно их.
Еще один отличный ресурс, который поможет вам определиться с выбором деталей, — Rotor Builds. Сайт демонстрирует созданные пользователями дроны и включает в себя такие детали, как списки деталей и руководства по сборке! Это отличное место для поиска вдохновения.
Бесщеточные двигатели квадрокоптера
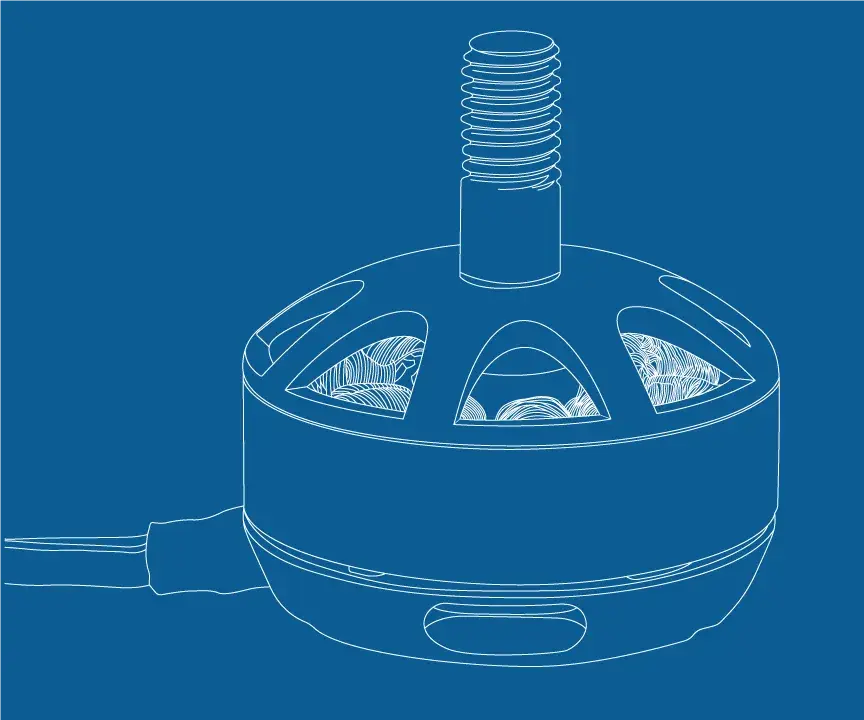
Именно эти двигатели обеспечивают тягу вашего квадрокоптера для достижения безумных скоростей, которых достигают современные дроны. Существует множество вариантов бесщеточных двигателей для мини-квадрокоптеров, и выбрать их довольно сложно. При выборе мотора необходимо ознакомиться с техническими характеристиками, которые прилагаются к мотору производителем. Вы должны иметь возможность найти подробную информацию о весе, тяге, мощности, оборотах в минуту и т.д.
При сборке дрона внимательно изучите технические характеристики двигателя:
Размер двигателя
Первый момент — это размер, размер двигателя обычно указывается в формате XXYY, где первые две цифры означают диаметр статора в мм, а вторые две — высоту магнитов. В принципе, чем больше эти цифры, тем больший крутящий момент способен производить двигатель, считайте это как размер двигателя, а недостатком больших размеров является вес. С точки зрения производительности более высокий крутящий момент позволяет двигателю быстрее достигать заданной скорости, увеличивая чувствительность и реакцию дрона. Это может быть полезно в случае более тяжелого квадрокоптера или при использовании тяжелых стоек.
KV
Еще один фактор, который необходимо учитывать, это kv, что означает константу скорости двигателя, которая означает, сколько оборотов в минуту на вольт может выдать ваш двигатель, например, двигатель 2300kv при полном газе на 10В будет вращаться со скоростью 23000 об/мин. Выбор значения kv подобен выбору передачи в механической коробке передач. Переход на низкую передачу дает больший крутящий момент, но меньшую максимальную скорость, а переход на более высокую повышает максимальную скорость ценой снижения крутящего момента. Вообще говоря, для более высокого значения требуется либо большой мощный двигатель, либо невероятно легкая установка. Например, двигатель 3″ будет иметь гораздо более высокий номинал kv по сравнению с двигателем 5″.
В следующей таблице перечислены некоторые возможные варианты в зависимости от размера вашего опоры:
| Размер | Рекомендуемый размер статора | Рекомендуемая высота магнита | Рекомендуемый KV двигателя | Рекомендуемый размер ESC |
| 2″ | 11 | 03-06 | 4000-8000 | 6 — 12A |
| 3″ | 13-14 | 06-07 | 3000-4000 | 12 — 20A |
| 4″ | 13-22 (зависит от рамы) | 04-07 | 2400-2900 | 20A |
| 5″ | 22-23 | 05-07 | 2200-2800 | 20 — 35A |
| 6″ | 22-23 | 06-08 | 2200-2800 | 30 — 40A |
| 7″ | 300мм+ | 06+ | 1800-2300 | 30A+ |
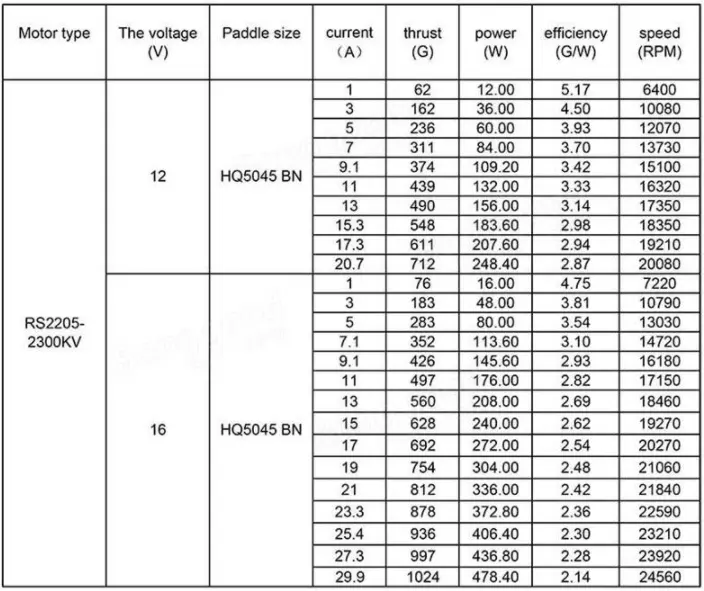
При поиске двигателя вы должны найти таблицу технических характеристик, в которой подробно описаны тяга с различными стойками и потребление ампер, которые нам понадобятся позже. Как правило, для мини-квадрокоптера вы должны стремиться к соотношению тяги и веса 10-1. Следующая таблица — это пример мотора Emax rs2205 Red Bottom, который был лучшим мотором 5″. В настоящее время он имеет средние характеристики по сравнению с конкурентами, но отлично подойдет для первой сборки.

Рекомендуем изучить: Руководство по бесщеточным двигателям для квадрокоптеров
Отличным ресурсом для исследования и сравнения двигателей является Miniquad Test Bench, который ведет Райан Харрелл. На сайте Райан дает отзывы о большинстве современных моторов и предоставляет все данные, чтобы вы могли оценить и провести собственные сравнения. Если вы не уверены, что у вас мотор нужного размера, посмотрите на некоторые из вращающихся реквизитов и посмотрите, соответствует ли он вашим ожиданиям.
Электронный регулятор скорости дрона (ESC)
Эти небольшие компоненты, известные как электронные регуляторы скорости, вырабатывают трехфазный переменный ток, необходимый для привода двигателей. Полетный контроллер посылает сигнал на Esc, чтобы сообщить ему, с какой скоростью он должен вращать двигатель в данный момент времени. Вам понадобится по одному регулятору скорости для каждого двигателя, вы можете либо приобрести четыре отдельных регулятора, чтобы установить их на руки, либо приобрести плату «все в одном», которая помещается внутри рамы, если у вас есть место.

Что нужно учитывать:
Потребление ампер вашей установки! Помните те таблицы двигателей, которые вы рассматривали? Вы заметили, что там есть колонка «Потребление ампера». Вам нужно, чтобы ток разряда ваших ЭСК превышал это значение, иначе они могут вспыхнуть в середине полета!
ESC достаточно интеллектуальны и могут работать с различным программным обеспечением. На момент написания статьи вам следует рассматривать только ESC, работающие под управлением BlHeli_S или KISS ESC. Старое программное обеспечение BlHeli или Simon K уже устарело.
ESC может общаться с полетным контроллером по различным протоколам (считайте их языками). Текущим стандартным протоколом является Dshot, если ESC не поддерживает Dshot 600 или выше, его не стоит рассматривать в наши дни.
Контроллер полета дрона
Полетный контроллер — это мозг вашего дрона, он учитывает угол наклона дрона и ваши управляющие воздействия, рассчитывает, с какой скоростью должны вращаться двигатели, и посылает сигналы на ESC. Полетные контроллеры обычно создаются под определенное программное обеспечение, такое как Betaflight, KISS или Raceflight, поэтому выбор программного обеспечения может повлиять на ваше решение.
Самым дешевым и популярным вариантом в настоящее время является Betaflight, KISS, как говорят, более плавный, но более дорогой, и, наконец, Raceflight — более новая и передовая разработка.
Что нужно учитывать
Процессор — в основе всех полетных контроллеров лежит микропроцессор, который работает, чтобы удержать вас в воздухе. Мы используем только чипы F3 или F4, поэтому я бы рекомендовал выбирать полетный контроллер с одним из них. Чип F7 постепенно появляется, но мы пока не используем его по-настоящему. Старые чипы F1, присутствующие в платах CC3D и NAZE 32, уже устарели и не будут поддерживаться будущими обновлениями программного обеспечения.
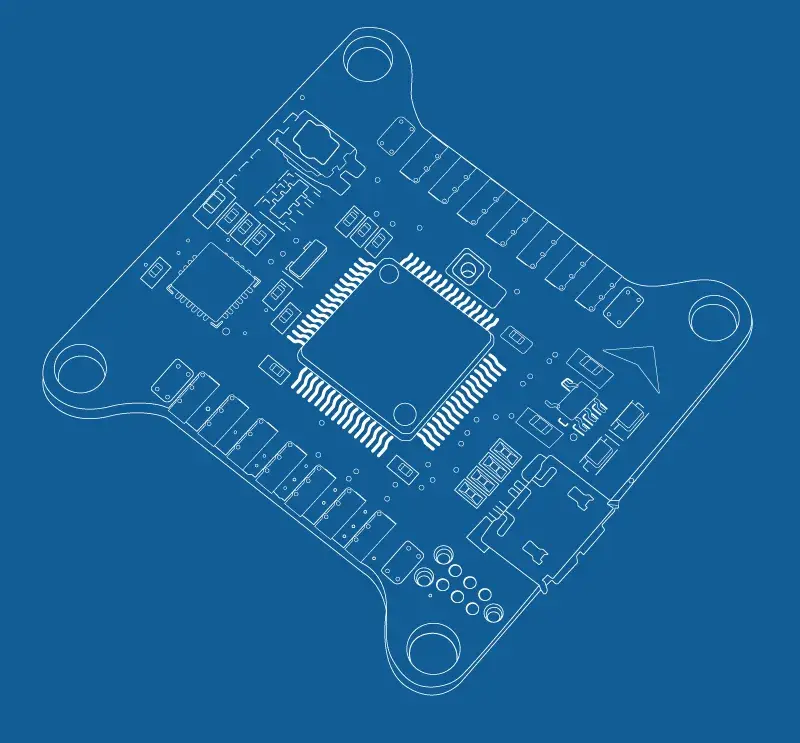
Все в одном или отдельно — Многие современные полетные контроллеры включают PDB в сам полетный контроллер! Это отлично подходит для узких сборок, так как вам нужна только одна плата в стеке, и проводка упрощается. Единственным недостатком является то, что они обычно более плотно заселены, что дает меньше места для пайки проводов и часто требует соединений с обеих сторон. Betaflight F3 — отличный пример универсального полетного контроллера.
OSD (On Screen Display) — полетные контроллеры со встроенным чипом OSD способны отображать на видео все виды полезной информации, такой как напряжение батареи, потребляемый ток и даже искусственный горизонт. Я бы настоятельно рекомендовал OSD, однако они могут быть установлены отдельно от полетного контроллера или на борту самого PDB.
Порты UART — Внешние устройства часто подключаются к полетному контроллеру через порты UART. К таким устройствам относятся приемники, автономные OSD, системы телеметрии и управляемые видеопередатчики. Для первой сборки вам, возможно, не придется беспокоиться об этих устройствах, но для более функциональных дронов вам нужно будет убедиться, что у вас достаточно портов UART для того, что вы хотите достичь. Я бы всегда рекомендовал посмотреть на распиновку выбранной вами платы, чтобы убедиться, что на ней есть разъемы для всего, что вам нужно.
PDB — The Power Distribution Board (распределительный щит питания)
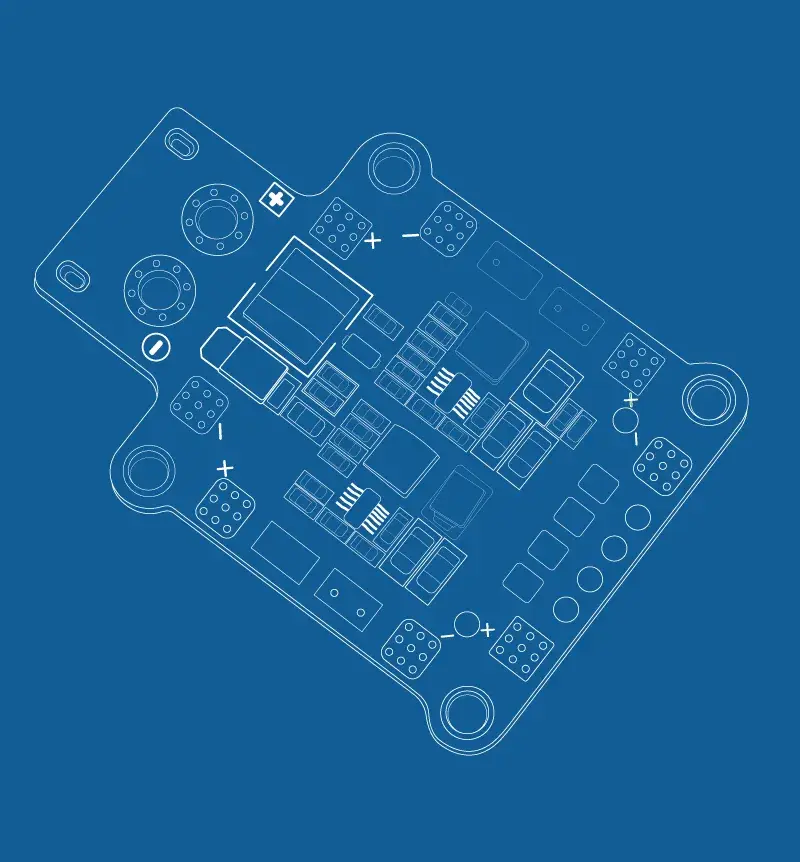
PDB принимает напряжение батареи и обеспечивает различные точки для подключения всей остальной электроники. Как правило, PDB имеет регулятор для питания низковольтных компонентов, таких как контроллер полета и камера. Из прочего внимательно изучите требования к напряжению, расположение разъемов и максимальный потребляемый ток.
Что нужно учитывать:
Требования к напряжению — такие компоненты, как полетный контроллер, чаще всего требуют 5 В для работы, некоторые камеры могут требовать 12 В. Если вы запитаете их напрямую от батареи, они, скорее всего, вспыхнут! По этой причине выбранный вами PDB должен содержать регуляторы напряжения или BECS (схемы устранения батареи) для обеспечения необходимой вам мощности!
Расположение разъемов — типичный PDB обеспечивает подключение батареи, подключение четырех ESC, а также различные низковольтные колодки (часто 5V и 12V). При планировании сборки постарайтесь представить, где вы хотите разместить все необходимое, и действительно ли колодки находятся там, где вы хотите. Например, некоторые разъемы для батарей торчат в стороны, что позволяет напрямую подключить разъем XT-60. Другие же просто имеют две колодки, что требует прокладки провода батареи.
Максимальный потребляемый ток — Этот параметр действительно необходим, только если у вас невероятно мощная установка, потребляющая больше тока, чем большинство других. PDB часто рассчитан на определенный ток (обычно более 100 А). То же самое следует сделать с любыми регуляторами, но опять же, это необходимо только для сложных, более энергоемких установок, таких как RunCam Split.
FPV камера
Это глаз вашего дрона, все, что он может увидеть, вы, надеюсь, увидите в своих очках! Здесь важно, чтобы мы могли четко видеть при любом освещении и чтобы не было задержки в передаче изображения, которая может привести к аварии. Здесь есть несколько очень похожих вариантов, и все они будут работать отлично. Большинство камер также поставляются с множеством креплений и футляров, которые подойдут к любой раме.

С таким количеством доступных вариантов и появлением новых продуктов выбор подходящей камеры может оказаться непосильной задачей. На что следует обратить внимание при покупке FPV-камеры? Как выбрать между различными типами камер, доступными сегодня на рынке? Прочитайте наше руководство «Лучшие FPV-камеры», которое поможет ответить на эти вопросы! При выборе FPV-камеры необходимо учитывать множество факторов. Мы составили список самых важных, о которых следует подумать.
Что нужно учитывать:
Тип датчика — FPV-камеры обычно имеют внутри либо CMOS, либо CCD датчик изображения. Как правило, камеры CMOS дешевле и легче, но не обладают способностью быстро реагировать на изменения в освещении. Это очень необходимо в FPV полетах, так как мы часто сталкиваемся с ярким солнцем, за которым следует темная земля, и любой недостаток видимости может привести к аварии!
Вы можете обойтись дешевой CMOS-камерой, однако CCD-камера даст вам лучшие результаты. Почти все CCD-камеры используют сенсор Sony Super HAD II, который является золотым стандартом в FPV дронах. В качестве примера можно привести камеры RunCam Swift или HS1177.
Есть также несколько специальных камер, которые лучше используют CMOS, например, камеры с более высоким разрешением Monster или Eagle, а также камеры для съемки в условиях низкой освещенности, такие как Owl или Night Wolf.
Разрешение и задержка — я сгруппировал эти два параметра вместе, поскольку они идут рука об руку: чем выше разрешение, тем больше задержка! Аналоговые камеры оцениваются в ТВЛ — это количество горизонтальных линий на экране.
Из-за дополнительной задержки я бы рекомендовал использовать камеру с тем же разрешением, что и ваши очки (обычно 600 твл). Еще один момент — разрешение 4:3 или 16:9, причем 4:3 является наиболее распространенным.
Особенности камеры — некоторые камеры имеют специальные функции, например, возможность контролировать напряжение батареи и отображать его на экране. Другие варианты — это камеры с низким уровнем освещенности, которые могут видеть почти в полной темноте. Существуют мини и даже микрокамеры, которые могут быть лучшим выбором для небольших строений, а некоторые камеры оснащены микрофоном для передачи звука.
Объектив — Объективы разного размера дают разное поле зрения (FOV), что позволяет пилоту видеть больше вокруг себя. Чем больше поле зрения, тем больше эффект «рыбий глаз», с которым вам придется иметь дело.
2,8 мм — старый стандарт, очень узкий FOV
2,5 мм — отличный универсальный объектив, с таким же обзором, как у GoPro!
2,1 мм — широкоугольный объектив, дает отличный обзор для фристайла, но может оказаться слишком широким для гонок
Сравнение объективов можно увидеть в этом видео.

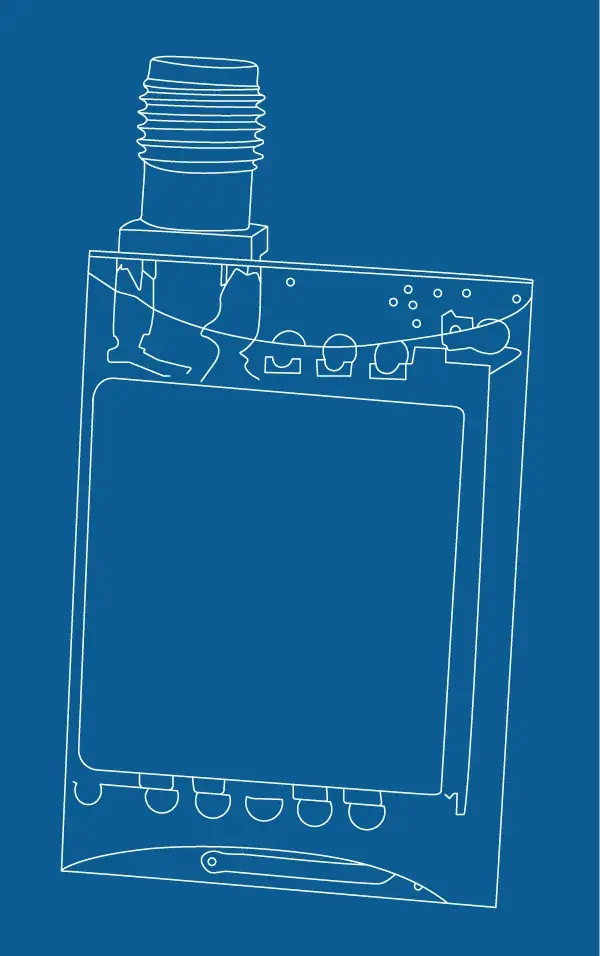
Видеопередатчик VTX
Видеопередатчик принимает сигнал от вашей камеры и передает его через антенну.
Что нужно учитывать:
Выходная мощность — разные VTX передают видео с разной мощностью. Часто они варьируются от 25 мВт до 800 мВт, а некоторые предлагают средства переключения выходной мощности.
Варианты каналов — Большинство современных VTX могут работать в большинстве канальных диапазонов, включая Raceband. Если список каналов VTX совместим с вашим приемником, то все будет в порядке!
Качество сигнала — Этот вопрос зависит от того, с кем вы будете летать. Вы заметите, что некоторые VTX предлагают ту же мощность и те же каналы, но стоят в четыре раза дороже! Причина этого в том, что более дешевые VTX излучают шум в гораздо более широком диапазоне, чем выбранный канал, что может привести к помехам в видеосигналах других пилотов.
Если вы собираетесь летать в одиночку, дешевый VTX отлично подойдет вам, но если вы собираетесь летать в больших группах или на соревнованиях, вам действительно нужен чистый передатчик, такой как TBS Unify Pro или IRC Tramp.
Варианты переключения — Если вы собираетесь летать с другими людьми или на соревнованиях, то вам часто придется переключать каналы, чтобы все могли получить чистое видео. Традиционно VTX имеют небольшую кнопку, которую можно использовать для переключения каналов, диапазонов и уровней мощности, канал отображается на светодиодах на самом VTX.
Более дружелюбные к гонкам передатчики действительно подключаются к полетному контроллеру и позволяют переключать каналы с помощью экранного меню или передатчика Taranis. Хотя эта функция кажется незначительной, она имеет огромное значение при полетах в группах из более чем трех пилотов, и без нее я больше не могу обойтись.
Обязательно проверьте, что разрешено в вашей стране! Некоторые VTX имеют ограничения в 25 или 200 мВт.
Антенна FPV
Лучший способ улучшить дальность или четкость видео — это не обязательно увеличение выходной мощности VTX, а приобретение хорошей пары антенн. Те черные дипольные антенны, которые вы получаете с дешевыми очками или VTX, называемые «резиновыми утками», действительно не работают хорошо, и их часто выбрасывают и заменяют антеннами высокого класса. Для установки FPV требуется две антенны, одна для передачи видео, а другая для его приема.

Что нужно учитывать
Тип антенны — Различные конструкции антенн имеют разную производительность, не вдаваясь в подробности, диполи работают плохо, в то время как антенны с круговой поляризацией работают хорошо. Более инновационные антенны, такие как TBS Triumph или Pagoda, увеличивают дальность приема видеосигнала еще больше. Патч-антенна может быть использована для увеличения дальности, но только в одном направлении и должна использоваться только в качестве приемной антенны.
Тип разъема — Антенны поставляются с двумя типами разъемов SMA и RP-SMA, оба могут прекрасно общаться друг с другом, но вам нужно убедиться, что они подходят к разъемам VTX или очков. В противном случае можно приобрести адаптеры.
Поляризация — сама антенна может приходить на буксир с ароматами RHCP и LHCP работают одинаково, но для получения сигнала они должны совпадать. Наличие различных поляризаций позволяет получить больше пилотов в воздухе одновременно.
Прочность — Очевидно, что антенна на дроне будет подвергаться гораздо большему воздействию, чем антенна на ваших очках! По этой причине я рекомендую использовать вашу лучшую/самую хрупкую антенну в качестве приемника и использовать прочную защищенную антенну на дроне.
Пропеллеры для дронов
Надеюсь, вы уже выбрали размер своего дрона в дюймах, так что вы знаете размер своего реквизита! Моя честная рекомендация для новичка — купить большую коробку дешевых пропов, так как вы сломаете их невероятно быстро. Стойки часто обозначаются как AxBxC, где A — размер в дюймах, B — шаг (угол наклона стойки), а C — количество лопастей.
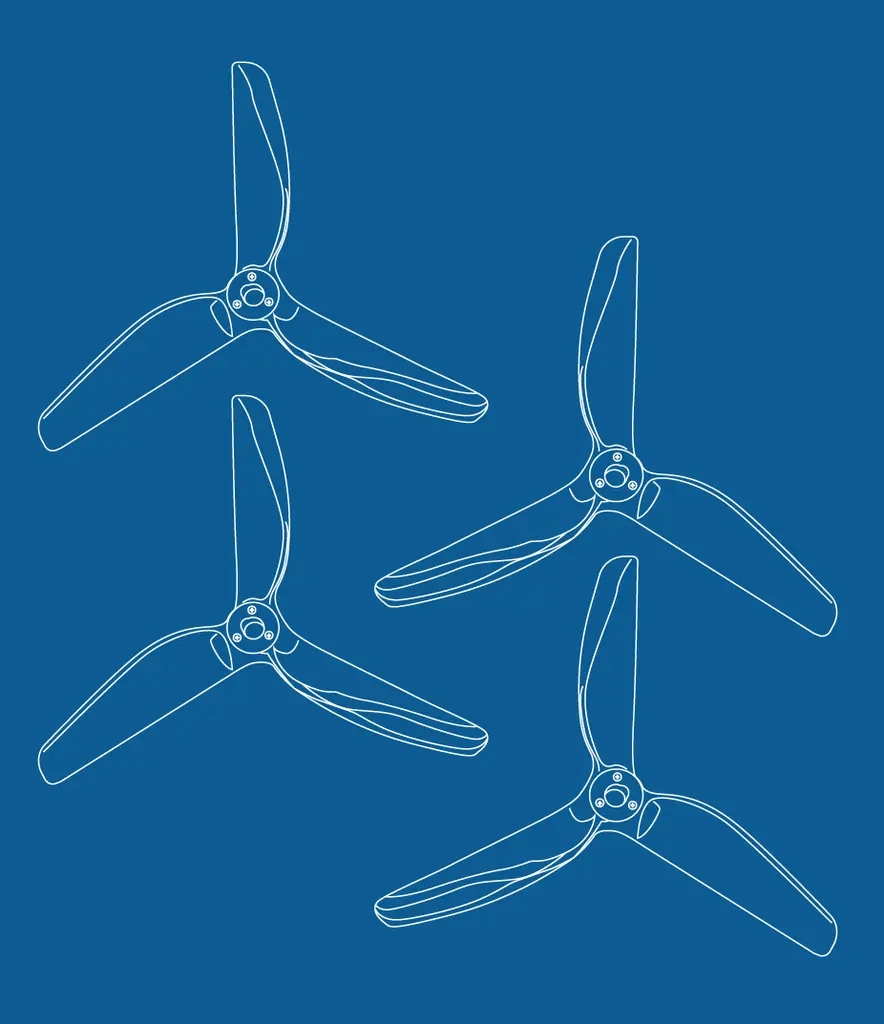
Например, 5x4x3 — это пропеллер 5″ с шагом 40 градусов и тремя лопастями (триблейд), который также может быть описан как 5040 триблейд и, по совпадению, является отличным местом для начала поиска квадрокоптера 5″.
Другие моменты, которые следует учитывать
Количество лопастей — Хотя мы начали использовать две лопасти, вскоре мы узнали, что добавление большего количества лопастей дает нам больше сцепления и контроля, предотвращая занос в поворотах. Стойки бывают от двух лопастей до шести лопастей, наиболее распространенным вариантом являются три лопасти. Увеличение количества лопастей увеличивает потребление тока, увеличивает вес пропеллера и снижает максимально достижимую максимальную скорость.
Потребление тока — Чем больше шаг винта, тем быстрее вы можете ехать, но в то же время ваши двигатели будут потреблять больше тока, что будет сильнее давить на электронику и быстрее разряжать аккумулятор! Добавление большего количества лопастей также является верным способом увеличить потребляемый ток. Если вы хотите использовать пропеллер с большим шагом (45+), я бы посоветовал приобрести более мощные моторы с большим крутящим моментом и более мощные ESC. (Для проверки можно использовать MiniQuad Test Bench или спецификацию производителя).
Вес — Часто игнорируется вес вашего
Жесткость — эту информацию вы сможете получить только при тестировании стоек или при чтении обзоров. Некоторые стойки, особенно тонкие, могут гнуться при вращении, что снижает их эффективность. Однако те, которые гнутся, могут лучше пережить столкновение, чем более жесткие стойки, которые могут просто сломаться при ударе. Найти подходящий проп для вас может быть непросто.
Специальные профили — Как правило, пропеллер имеет изогнутую аэродинамическую поверхность, предназначенную для эффективного рассечения воздуха и обеспечения максимально возможной подъемной силы. Некоторые пропы имеют несколько иную форму для изменения их характеристик. Примерами могут служить:
- Стойки Bullnose — Стойка Bullnose — это фактически ширина и длина большей стойки, уменьшенная до размера, для которого она предназначена (т.е. 6″ уменьшена до 5″) Это дает ей гораздо более широкий профиль с плоскими концами в отличие от круглых и обеспечивает большую мощность.
- Стойки RaceKraft — Недавно разработанные стойки Racekraft имеют переменный шаг по всей длине стойки. Идея заключается в том, чтобы обеспечить максимальную эффективность при скорости около 60 миль/ч, что делает их невероятно популярными среди гонщиков и любителей скорости!
- 3D-стойки — 3D-стойки предназначены для тех, кто хочет иметь возможность останавливать свои двигатели в воздухе и менять направление, позволяя летать в перевернутом состоянии столько, сколько захочет! Обычные стойки очень неэффективны при работе в 3D режиме, поэтому 3D стойки обычно полностью плоские и работают с шагом 45 градусов, чтобы сохранить их одинаковыми при обоих вращениях. Полет в режиме 3D сложен и не рекомендуется для новичков! Посмотрите Zoe FPV на YouTube, чтобы увидеть некоторые из лучших 3D полетов! DJI Mavic Can’t Touch My 3D Dancin’
Надеюсь, это даст вам представление о том, на что следует обратить внимание. Это видео Rotor Riot показывает некоторые различия между стойками и почему пилоты Чад Новак и мистер Стил летают на том, на чем летают.
https://youtu.be/TbAkcKPHqt8
Радиопередатчик и приемник
Я скажу вам то, что почти каждый другой сайт или форум дронов скажет вам в отношении пультов дистанционного управления…. Если вы можете себе это позволить, купите FrSky Taranis! За те деньги, которые вы заплатите, Taranis действительно является исключительным пультом, который может делать все, что вы можете придумать. В качестве Taranis вы можете выбрать QX7 или X9D и их варианты deluxe plus или special addition.
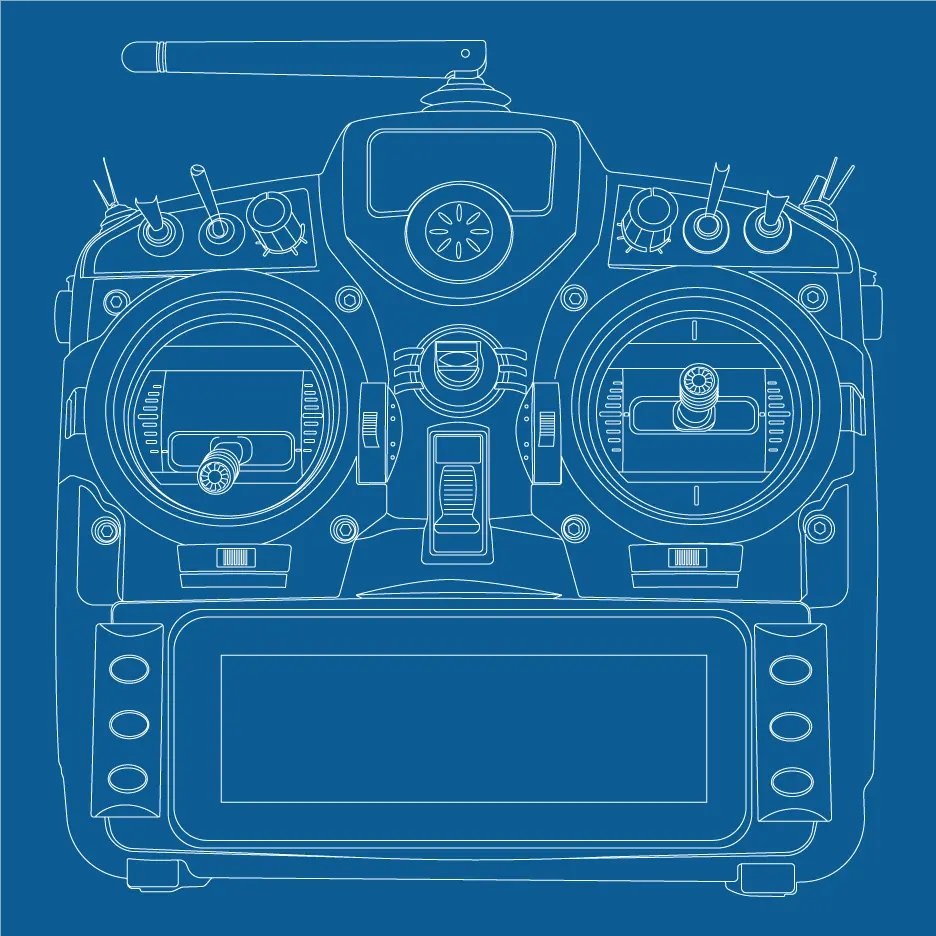
Другими вариантами могут быть более дешевые модели FlySky i6, Spectrum или, если вы хардкорный геймер, Turnigy Evolution, который больше похож на игровой контроллер.
Передатчики сами по себе могут быть длинной темой, поэтому я просто попытаюсь перечислить несколько характеристик, которые вы должны искать в пульте и приемнике:
Что нужно учитывать:
Имбалы и хват — Вы, вероятно, еще не знаете, как будете держать радиостанцию, и захотите попробовать несколько вариантов, но в основном некоторые люди предпочитают держать стики большими пальцами, как контроллер PlayStation или Xbox, а другие предпочитают зажимать стики между большим и указательным пальцами. Это не имеет значения, однако некоторые радиоприемники больше подходят для одного или другого. Еще один момент — это общее качество имбалов в пульте, высококачественные имбалы с датчиком Холла будут ощущаться гораздо мягче, чем более дешевые версии.
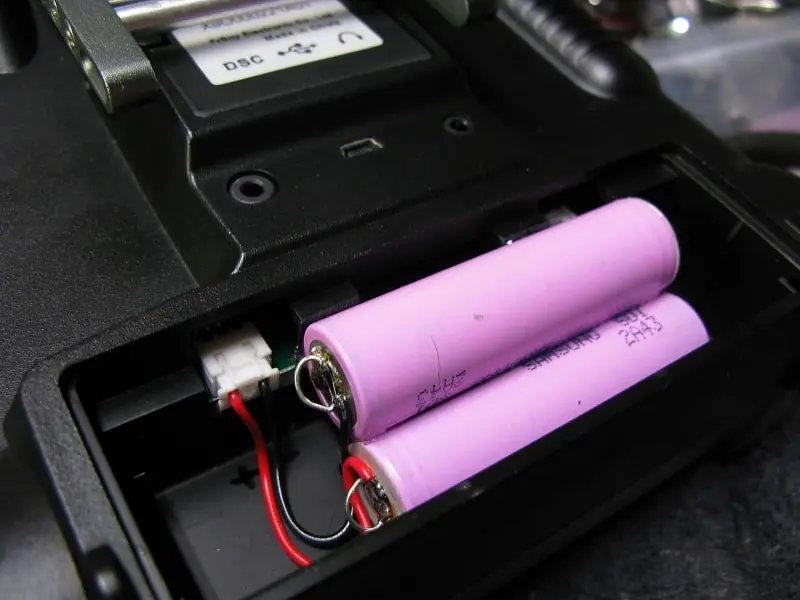
Батарейки — Некоторые пульты оснащены перезаряжаемыми батарейками, в то время как другие работают на батарейках типа АА. Я бы очень рекомендовал приобрести систему, которую можно заряжать, так как они стоят дешевле и служат намного дольше. Мне пришлось модифицировать свой Taranis QX7, чтобы он мог работать с батареями 18650:
Протокол связи — Все радиостанции разговаривают с соответствующими приемниками на своем языке, причем некоторые из них передают сигналы от стиков быстрее, чем другие. Это означает, что вы будете быстрее реагировать и иметь больше контроля над дроном. Вам следует искать пульты/приемники, которые поддерживают либо SBUS (FrSky), IBUS (FlySky), DSM2 и DSMX (Specktrum).
Телеметрия — дрон может посылать ключевую информацию на пульт дистанционного управления, позволяя вам знать, когда приземляться и т.д. Для этого функция телеметрии должна быть включена как на передатчике, так и на приемнике. Многие пульты с этой функцией могут разговаривать с вами и считывать настраиваемые предупреждения, чтобы сообщить вам, когда нужно приземлиться или когда ваш сигнал становится слабым!
Варианты приемников — При выборе пульта стоит обратить внимание на то, какие приемники для него существуют. Например, некоторые из них слишком велики для использования в мини-квадрокоптерах, а некоторые слишком малы и не имеют достаточного радиуса действия. Ищите систему, которая соответствует вашим потребностям и цене. Если вы решили купить готовый к полету дрон с приемником, убедитесь, что он совместим с вашим пультом! Обычно вы можете выбрать между FrSky, FlySky и Spectrum.
Настройка — Большинство пультов позволяют настраивать основные каналы и даже устанавливать звуковые оповещения, однако некоторые могут предложить гораздо больше! Я говорю об Open Tx, которая является прошивкой, используемой в Taranis и некоторых других радиостанциях. Эта прошивка очень легко настраивается и позволяет делать буквально все, о чем вы только можете подумать. Конечно, кому-то это может и не понадобиться, но такие возможности, как тонкая настройка параметров полетного контроллера и изменение канала видео через пульт, невероятно удобны!
Обратите внимание, что для использования некоторых из этих функций передатчик и приемник должны их поддерживать.
FPV-очки
Очки, как и передатчики, являются огромной темой, поэтому мы подробно рассмотрели их в нашем руководстве «Лучшие FPV-очки»! Они могут стать самой дорогой частью вашей установки, и единственным спасением является тот факт, что вы не разобьетесь и не разобьете их.
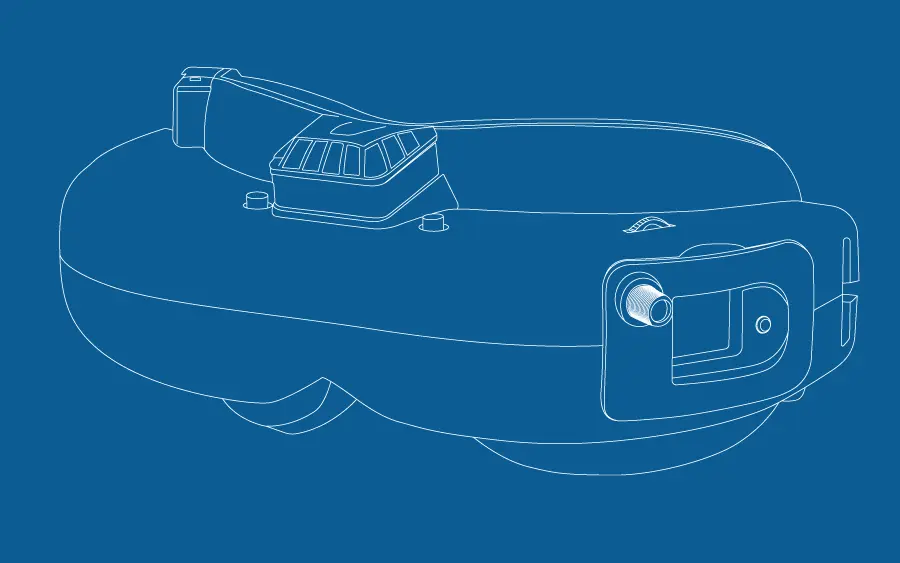
Очки часто имеют очень высокую стоимость при перепродаже, если они вам не нравятся! Я часто советую людям либо приобрести очень дешевую пару с целью последующей модернизации, либо сразу перейти на премиум-класс. Вот некоторые основные моменты, на которые следует обратить внимание:
Очки могут быть двух видов: очки с козырьком (например, FatSharks), которые оснащены небольшим дисплеем для каждого глаза, или более крупные очки в виде коробки, которые просто включают ЖК-экран в затемненную коробку, прикрепленную к лицу. Очки-футляры могут быть в десять раз дешевле некоторых FatSharks, но при этом обеспечивают приемлемую производительность, если вас не смущает форм-фактор.
Разрешение — Как и в случае с большинством дисплеев, разрешение будет иметь наибольшее значение с точки зрения производительности и цены. Конечно, FPV-камеры сами по себе не являются HD-качеством, однако для получения приемлемых впечатлений от полета вы должны стремиться к разрешению не ниже 640×480 пикселей. Как и в случае с FPV-камерами, вы можете выбрать разрешение 4:3 или 16:9.
FOV — означает поле зрения и относится к тому, насколько большим выглядит изображение в ваших очках. Низкий FOV будет сравним с просмотром телевизора вдалеке, в то время как более высокий FOV будет похож на кинотеатр Imax! Конечно, наступает момент, когда все становится слишком большим, и вам нужно найти оптимальный вариант! Я бы посоветовал искать в диапазоне от 30 до 60 градусов, на следующем изображении от Flite Test показано сравнение между некоторыми предложениями FatShark. Как правило, очки из коробки дадут вам гораздо большее разрешение и FOV по более низкой цене.

Приемник — некоторые очки поставляются со встроенным приемником, в то время как для других это будет дополнительный модуль. Следует обратить внимание на такие функции, как разнообразие, которое позволяет использовать две отдельные антенны для максимального усиления сигнала. Другие функции — поиск каналов и OLED-дисплеи. Эти функции могут быть вам не нужны, если вы планируете летать в одиночку или не слишком далеко.
HDMI — некоторые очки имеют вход HDMI, что позволяет использовать их для игры на симуляторе дрона или просмотра фильма. Ищите этот вариант, если вам важна эта функция.
DVR — DVR — это цифровой видеорегистратор, который снимает видео и сохраняет его на карту памяти micro SD для последующего просмотра. Это полезно, если вы не хотите носить с собой HD-камеру, однако качество DVR будет намного ниже, чем вы ожидаете.
Посмотрите некоторые видеозаписи с микро дрона, который не может нести камеру: ARMATTAN BUMPER — Maiden Flight RAW!
Аккумуляторы для квадрокоптеров
Аккумуляторы бывают разных форм и размеров, и очень важно подобрать подходящий для вашей сборки. Большинство рам или моторов рекомендуют определенный размер батареи в списке предлагаемых деталей. Когда дело доходит до батарей, их никогда не бывает достаточно, и я бы рекомендовал новичкам иметь как минимум четыре.

Обычные полеты длятся от 2,5 до 4 минут, поэтому наличие только одной батареи может быстро надоесть!
Внимание! В дронах используются LiPo (литий-полимерные) батареи, которые крайне нестабильны и опасны при неправильном использовании. Перед зарядкой или использованием любых LiPo аккумуляторов обязательно изучите правила техники безопасности.
Что нужно учитывать:
Количество элементов — Обычно в описании аккумуляторных батарей указывается количество элементов, например, 4 элемента или просто 4s. Это означает количество последовательно соединенных элементов, каждый из которых имеет максимальное напряжение 4,2 В. Общее напряжение блока можно определить, умножив количество элементов на 4,2, т.е. 4 элемента x 4,2 вольта = 16,8 В. Чем выше напряжение, тем больше мощность дрона и тем быстрее он летит. Выбор напряжения выше того, на которое рассчитаны ваши компоненты, приведет к их перегоранию.
Емкость — Емкость элемента измеряется в мАч, что означает миллиампер-часы. Это означает, что аккумулятор емкостью 1500 мАч может выдавать 1,5 А в течение часа, конечно, мы хотим получить гораздо больше, поэтому время полета будет гораздо короче. Увеличение размера аккумулятора увеличит время полета, но увеличит вес, и наступит момент, когда дрон не сможет поднять дополнительный вес аккумулятора.
Рейтинг C — рейтинг C часто является тем, что отличает хороший аккумулятор от плохого, он относится к тому, как быстро аккумулятор может разрядить свою энергию, и часто является ограничивающим фактором в высокопроизводительных дронах. Например, если у нас есть аккумулятор емкостью 1500 мАч с номиналом 10C, это означает, что при разрядке он может выдать максимум 15 А. 10C — это относительно низкий показатель, и он не обеспечит достаточной мощности для большинства дронов такого размера. Для большинства гоночных и фристайл-установок я бы рекомендовал рейтинг C не ниже 45. Обратите внимание, что рейтинги C некоторых компаний не являются точными, поэтому при выборе аккумулятора следует изучить отзывы — в общем, вы получаете то, за что платите!
Зарядные устройства Lipo
Для зарядки аккумуляторов lipo потребуется специализированное зарядное устройство. Их необходимо заряжать таким образом, чтобы управлять их напряжением во избежание катастрофы. К счастью, существует множество интеллектуальных зарядных устройств для lipo, которые берут на себя большую часть тяжелой работы, а ключевой функцией, которая вам необходима, является балансировка зарядки.

Я бы не советовал приобретать дешевое относительно неизвестное зарядное устройство из-за риска того, что может произойти, если что-то пойдет не так.
Внимание! Никогда не заряжайте аккумуляторы без присмотра. НИКОГДА!
Что нужно учитывать:
Напряжение — важно убедиться, что зарядное устройство может работать с вашими батареями, это будет указано либо в спецификации количества элементов, либо в спецификации напряжения.
Максимальный ток или мощность — контролирует скорость зарядки аккумуляторов, при зарядке мы обычно должны выбрать ток для зарядки. Для большинства аккумуляторов он должен быть равен 1С, то есть аккумулятор емкостью 1500 мАч должен заряжаться при токе 1,5 А. Большинство зарядных устройств рассчитаны либо на максимальный ток (Амперы), либо на мощность (Ватты), которая равна току, умноженному на напряжение.
В итоге, для зарядки аккумулятора 4s (16,8 В) емкостью 1500 мАч за один час потребуется 16,8 В x 1,5 А = 25,2 Вт. Если наше зарядное устройство не может обеспечить такую мощность, то батарея будет заряжаться дольше. Если вы хотите, скажем, заряжать четыре батареи одновременно с такой скоростью, то вам понадобится зарядное устройство мощностью не менее 110 Вт с небольшим запасом. Мы можем заряжать одинаковые батареи одновременно, используя плату параллельной зарядки.
Источник питания — Электричество, которое поступает из розеток в вашем доме, является переменным (обычно 230 В переменного тока в Европе или 120 В переменного тока в США). Наши зарядные устройства и большинство электронных устройств работают на постоянном токе и требуют источника питания для преобразования его в 12В. Некоторые зарядные устройства имеют встроенный блок питания, но часто стоят дороже, а некоторые требуют внешнего источника, который вам придется искать самостоятельно. Если вы не понимаете этого, я бы посоветовал вам приобрести зарядное устройство со встроенным блоком питания. Вы можете определить это, посмотрев на входное напряжение зарядного устройства и выбрав устройство с входом 230-120 В переменного тока.
Параллельная зарядка — Большинство зарядных устройств имеют только один выход, если вы хотите заряжать несколько батарей, вам понадобится плата для параллельной зарядки. Я бы предложил плату со встроенным предохранителем.
Внимание! Параллельная зарядка добавляет еще больше сложностей и рисков. Убедитесь, что вы прочитали и поняли, что вы делаете, прежде чем пытаться параллельно заряжать! Пожалуйста, посмотрите это видео от Rotor Riot, в котором рассказывается об основах.
HD-камера
Этот пункт совершенно необязателен, но необходим для записи отснятого материала в формате высокого качества, пригодном для просмотра. Это почти необходимость, если вы хотите показать отснятый материал друзьям или опубликовать на YouTube. К минусам добавления HD-камеры можно отнести дополнительный вес и риск установки дорогой камеры на дрон, который может разбиться или потеряться.

Что нужно учитывать:
Вес — Любая HD-камера, которую вы добавите к своему дрону, будет напрямую влиять на его производительность. По этой причине вы должны постараться выбрать максимально легкую камеру, которая обеспечит нужное вам качество видео.
Варианты крепления — Вам понадобится надежный способ крепления камеры к дрону, так как использование резинок или кабельных стяжек может привести к дорогостоящей потере! Либо ищите раму со встроенными вариантами крепления, либо выбирайте 3D-печатный корпус.
Качество видео — Очевидно, что это связано с ценой: GoPro Hero5 Session в настоящее время является золотым стандартом для пилотов квадрокоптеров. Не все хотят рисковать камерой за 300 долларов на квадрокоптере, поэтому более дешевые и почти такие же по возможностям варианты, такие как RunCam 3, Foxeer Legend и Xiaomi Yi — отличный выбор. Ищите камеры с более высокой частотой кадров (60 кадров в секунду) для HD-видео с широким полем зрения и динамическим диапазоном. На YouTube есть множество сравнительных видеороликов, которые можно использовать для выбора наиболее понравившегося вам изображения.
Прочность — Учитывая, что эти вещи часто разбиваются, камера высокого класса с механическим объективом, вероятно, не лучший выбор! Если вы хотите защитить свои вложения, то вам нужна камера в стиле экшн-камеры.
Относительно новым вариантом является RunCam Split, который объединяет FPV и HD камеру в одном устройстве. Split состоит из FPV-камеры и дополнительной платы, которая крепится к вашему стеку и обеспечивает запись в формате HD. Они относительно дешевы и решают проблемы с весом, обычно связанные с HD-камерами, однако они не идеальны. Вот обзор от Джошуа Бардвелла, очень уважаемого обозревателя и учителя в сообществе FPV.
На этом список деталей исчерпан, надеюсь, теперь у вас есть представление о том, какие детали вы хотите использовать, и мы можем приступить к реальной сборке вашего дрона! Не существует определенного правильного или неправильного порядка, однако я считаю, что мои сборки обычно начинаются с PDB и идут по направлению наружу. Это позволяет систематически собирать все необходимое и одновременно дает вам пространство для легкого подключения каждого провода, когда это необходимо. Если некоторые компоненты не подходят по порядку, не стесняйтесь смешивать их, это всего лишь руководство к действию!
Начнем собственно сборку нашего квадрокоптера…
КАК ПОСТРОИТЬ БЕСПИЛОТНИК FPV — ШАГ ЗА ШАГОМ
Шаг 1: Сборка рамы
Самое первое, что нужно сделать, это собрать раму (или, по крайней мере, ее нижнюю часть). К сожалению, рамы часто поставляются в упакованном виде как ряд деталей из углеродного волокна, поэтому вам придется потрудиться, чтобы подготовить их! При этом обратите внимание на расположение всех пластин и учтите, где вы собираетесь устанавливать компоненты и прокладывать провода.

Некоторые люди любят шлифовать или наносить клей на края углеродного волокна, чтобы защитить края, однако это не обязательно для качественной рамы.
Внимание! Слишком сильная затяжка винтов приведет к срыву головок винтов или внутренней резьбы на любых алюминиевых деталях, Не затягивайте винты сильнее, чем от руки!
Совет — Наши дроны на самом деле очень подвержены вибрации, и некоторые винты могут расшататься! Нанесите небольшое количество фиксатора резьбы на каждый винт, чтобы предотвратить это!
Шаг 2: Монтаж PDB
Первым компонентом, который я предпочитаю устанавливать, является PDB, причина этого в том, что все подключается к нему, и он является центральным узлом вашего дрона. Чтобы установить PDB, вам нужно подумать о том, в каком направлении вы хотите его установить, основными соображениями будут местоположение батареи и, если у вас плата «все в одном», куда вы хотите направить USB-разъем. Для крепления PDB вы будете использовать нейлоновые или резиновые стойки, которые обычно крепятся через раму и позволяют собрать стопку плат.
Совет — Перед установкой PDB следует припаять разъем батареи и лудить все площадки, это даст вам больше пространства для работы.
Внимание! Каркас из углеродного волокна проводит электричество, поэтому важно расположить PDB подальше от него, чтобы никакие компоненты, колодки или провода не соприкасались с углеродным волокном. Это относится ко всей электронике в вашей сборке.
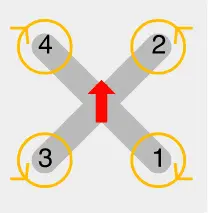
Шаг 3: Монтаж двигателей
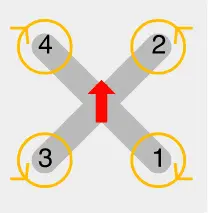
Следующим логическим шагом является установка двигателей, если у вас есть двигатели, вращающиеся по часовой стрелке и против часовой стрелки, вам нужно будет обратить пристальное внимание на порядок установки двигателей. На схеме ниже показана схема квадрокоптера Betaflight, которая широко используется в большинстве современных программ.
Двигатели можно закрепить винтами, и снова хорошей идеей будет использовать фиксатор резьбы, а не затягивать их слишком сильно, так как в этом случае вы можете повредить сам двигатель.
Внимание! Иногда болты, поставляемые с двигателями, могут быть слишком длинными. Если болт может коснуться обмотки, это приведет к короткому замыканию и повреждению ваших компонентов. Обязательно проверьте это перед подачей питания.
Шаг 4: Монтаж ESC
Установив двигатели, мы можем установить PDB и начать подключение. Если у вас четыре отдельных ESC, то лучше всего установить их на кронштейнах. Как и в случае с PDB, важно, чтобы ESC не соприкасались с рамой. Лучший способ защиты от этого — держать ЭСК защищенными термоусадочной пленкой. Для фактического монтажа я использую двусторонний скотч, чтобы удержать их на месте, а затем обматываю их электрической изолентой после подключения.
Если вы выбрали ESC «четыре в одном», вам не придется беспокоиться обо всем этом, просто установите его на раму, как описано для PDB!
Совет — В продаже имеются чехлы для ESC, однако гораздо более дешевый вариант — взять старую лопасть пропеллера и обмотать ее скотчем. Это защитит ESC от разрушения реквизитом в случае аварии. (Я предпочитаю добавлять их в последнюю очередь, после того как все протестирую!)
Шаг 5: Подключение ESC к моторам
Когда ЭСК установлены, пора приступать к пайке! Первое, что я хочу сказать, это двигатели. Каждый мотор имеет три провода, которые нужно припаять к колодкам ESC. С современными ЭСК порядок не имеет значения, так как мы можем изменять направление моторов с помощью программного обеспечения! Вот основная процедура, которой я предпочитаю следовать:

1: Обрежьте и зачистите провода двигателя до соответствующей длины
Совет — Видите, как скручены провода моего двигателя? Я люблю оставлять некоторую слабину, так как при столкновении некоторые детали могут потянуться и повредиться. Оставляя дополнительную длину проводов, я получаю больше возможностей, если решу укоротить их. Помните, что провода гораздо легче обрезать, чем удлинить.
2: Обработайте оловом колодки ESC и концы двигателя, это значительно облегчит и ускорит их пайку.
3: Припаивайте каждое соединение по очереди. Вы должны поднести провод к площадке, быстро нагреть оба провода и держать их неподвижными, пока они остывают.
4: Проверьте соединения, главное — убедитесь, что соединения не перекрываются и не касаются друг друга, так как это приведет к короткому замыканию. Надеемся, что здесь у вас высококачественные блестящие соединения, а если нет, не бойтесь их переделать. Помните, что достаточно одного из этих соединений, чтобы ваш дрон упал с неба!
Компания Armattan выпустила отличное видео по пайке ESC, которое я советую вам просмотреть, они также производят несколько отличных продуктов, которые вы можете посмотреть на их сайте. Для получения подробного руководства проверьте наши советы и рекомендации по пайке.

Эти же принципы будут использоваться для всех паяных соединений на вашем дроне!
Шаг 6: Подключение ESC к PDB
Мы наполовину закончили с ESC! Следующий шаг — подключить их к PDB! Здесь используется точно такой же принцип, как и раньше, однако вы подключаете положительный (красный) и отрицательный (черный) провода к соответствующим колодкам. Опять же, как и в случае с проводами двигателя, я предпочитаю оставлять небольшую слабину, чтобы обезопасить себя в случае аварии.
Внимание! В отличие от проводов двигателя, неправильное подключение этих проводов может привести к возгоранию вашего квадрокоптера! Дважды проверьте все и не включайте питание, пока не будете уверены в своей работе!
Еще одна отличная инструкция по пайке для начинающих от Rotor Riot с участием единственного и неповторимого Чада Новака. В этом видео он подробно рассказывает об основах пайки ESC к PDB и некоторых вещах, на которые следует обратить внимание! Советы по пайке тут.

Шаг 7: Первый тест!!!
Когда наша система питания настроена, мы готовы провести первое испытание. Я рекомендую проверять и тестировать все как можно чаще по двум причинам:
- Вы можете предотвратить возгорание всей вашей установки! Если есть проблема с проводкой PDB, например, по крайней мере, это не поджарит ваш полетный контроллер и всю систему FPV!
- В дальнейшем вы сможете использовать полученную информацию для поиска неисправностей других компонентов. Устранив возможные причины, мы сможем решить будущие проблемы гораздо быстрее
Первая проверка, которую я всегда рекомендую проводить перед подачей питания, — это проверка на наличие короткого замыкания с помощью мультиметра. Мы можем установить наш мультиметр в режим непрерывности, который будет издавать звук, если провода находятся в контакте. Если мы проверим целостность положительного и отрицательного контактов на разъеме аккумулятора, мы не должны увидеть никакой целостности. Если мы получим звуковой сигнал, значит, произошло короткое замыкание, и подключение батареи приведет к повреждению вас или дрона!
FPV Know it all Joshua Bardwell создал для вас отличное видео, демонстрирующее, как выполнить эту проверку. На его канале более 1000 видео с бесценной информацией, которые я советую вам посмотреть, чтобы улучшить ваше понимание всего, что связано с FPV. В дальнейшем я буду ссылаться на некоторые другие его видео.
Если вы прошли проверку целостности, теперь можно попробовать подключить батарею. Надеюсь, вы услышите звуковой сигнал от каждого ESC и, возможно, увидите небольшие подергивания моторов. Если есть какие-либо признаки дыма или огня, немедленно отключите батарею от сети и осмотрите все проблемные места.
Шаг 8: Монтаж системы FPV
Когда система питания готова, следующее, что нужно сделать, это настроить нашу FPV систему, то есть камеру и VTX.
Внимание! Включение питания VTX без антенны приведет к его перегоранию. Подключите антенну сейчас, чтобы предотвратить это в дальнейшем! Я всегда оставляю старые дипольные антенны на своих запасных VTX, чтобы не забыть.
Прежде чем подавать питание на эти компоненты, неплохо было бы сначала их установить. Как правило, камеры и VTX поставляются с разъемами для проводов, поэтому мы можем просто подключить их, как только разберемся или припаяем. Надеюсь, на вашей раме есть специальное место для установки камеры, если нет, вы можете использовать небольшой кронштейн, который поставляется с большинством камер.
Совет — Большинство камер поставляется с запасным футляром, посмотрите на свой кадр и попробуйте определить, какой футляр подойдет к нему лучше всего.
При установке камеры необходимо учитывать угол ее наклона. В принципе, чем круче угол, тем быстрее ваш дрон будет двигаться вперед, когда вы пытаетесь смотреть прямо. Для начинающих я бы рекомендовал начальный угол наклона камеры около 15 градусов. По мере продвижения вы можете увеличивать его и найти свое оптимальное положение.
Для крепления VTX обычно приходится проявить немного больше фантазии. Большинство рам не имеют очевидного места для крепления, поэтому все зависит от того, где у вас есть место и с чем вы можете работать. Я рекомендую использовать кабельные стяжки или двухсторонний скотч, чтобы закрепить его на верхней или нижней пластине рамы. Посмотрите это видео о том, как профессиональный пилот мистер Стил собирает свою верхнюю пластину для вдохновения. Я поделился им, начиная с момента сборки VTX, но если вы хотите увидеть всю его сборку, посмотрите начало.
Шаг 9: Подключение системы FPV
Лучший способ питания камеры и VTX — от PDB, так как это позволяет аккуратно подключиться к полетному контроллеру. Сейчас самое время проверить спецификации ваших компонентов, в частности, входное напряжение. Например, 12 В или 5-19 В
Примечание — некоторые VTX имеют выходы питания для питания камер, если это так, вы можете использовать их для более чистой компоновки!
И камера, и VTX должны иметь два провода для питания — положительный и отрицательный. Ваш PDB должен иметь несколько низковольтных колодок, например, 5 В или 12 В, которые вы, надеюсь, подобрали в соответствии с другими компонентами! Вы должны подключить положительный (красный) и отрицательный (черный) провода к соответствующим колодкам. Два провода могут быть подключены к одной колодке, в этом случае они будут подключены параллельно.
Примечание — Если вы используете какой-либо вид OSD, либо отдельно, либо на контроллере полета/PDB, на разъемах заземления будут обозначены места для подключения заземления. Вы должны всегда использовать их для предотвращения влияния шумов на видеосигнал.
Последнее, что необходимо сделать, — это подключить видеосигнал. Этот провод (обычно желтый) должен выходить из видеовыхода камеры и напрямую подключаться к видеовходу VTX. Для сигнальных проводов вам не нужно беспокоиться о напряжении, и вы можете соединить два провода вместе.
Шаг 10: Протестируйте систему FPV
Совет — Как и в случае с системой электропитания, используйте мультиметр, чтобы проверить надежность всех соединений и отсутствие короткого замыкания, прежде чем подавать питание!
Теперь мы можем приступить к тестированию системы FPV! Еще раз убедитесь, что ваша видеоантенна подключена! Я не могу подчеркнуть это больше, вы были предупреждены! Подключите батарею, и на VTX должны загореться светодиоды. Теперь вы можете использовать ваши очки и настроить их на один и тот же канал с помощью соответствующих элементов управления. Каналы обозначаются буквой, а затем цифрой, например, R4. Буква описывает диапазон, на котором вы находитесь, а цифра — сам канал. На данный момент важно, чтобы каналы совпадали, а изображение было четким и ясным. Если это не так, возможно, вам придется вернуться и проверить проводку.
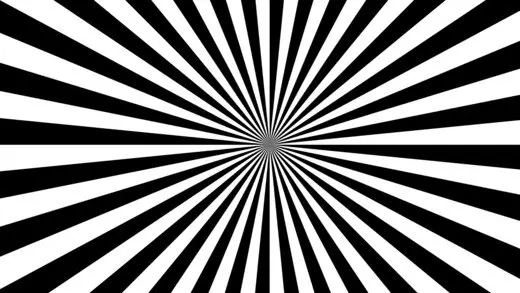
Надеюсь, все работает, и вы можете использовать это как возможность сфокусировать камеру, повернув объектив и используя гайку, чтобы зафиксировать его в нужном положении. Расположите дрон на расстоянии 2-3 м от диаграммы фокусировки, как показано ниже. При повороте объектива вы ищете точку, где вы можете различить линии, расположенные ближе всего к центру.
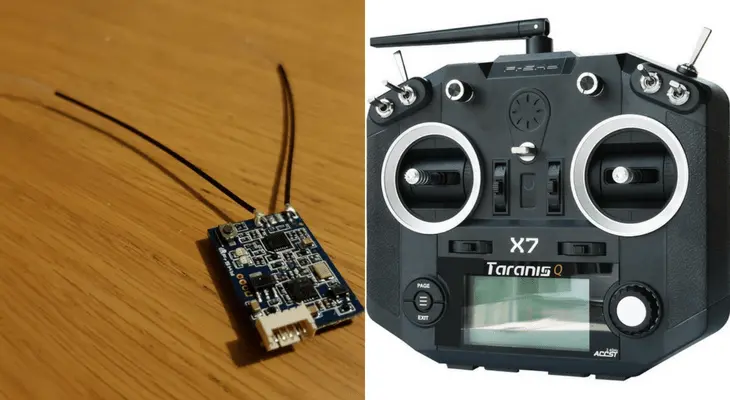
Шаг 11: Монтаж и питание приемника
Теперь нам нужно установить и запитать наш приемник. Обычно они работают от 5 В (за исключением Spektrum) и подключаются к положительному контакту 5 В и контакту заземления на PDB. Затем у нас будет сигнальный провод, который мы позже отправим на полетный контроллер, если ваш приемник поддерживает телеметрию, у вас может быть еще один провод для этого.
Вы заметите, что у вашего приемника есть один или два антенных провода, выходящих из одного конца. Их расположение очень важно для обеспечения хорошего сигнала, а также для того, чтобы ваш квадрокоптер не потерял сигнал и не упал с неба (отказоустойчивость). Идеальное расположение двух антенн — под углом 90 градусов друг к другу в форме буквы V, при этом необходимо стремиться к тому, чтобы их концы находились как можно дальше от карбона, чтобы предотвратить их блокировку.
Я предпочитаю устанавливать антенны либо на кронштейнах, либо прямо сзади. Идеальным способом крепления является прокладка кабельной стяжки в нужном месте и помещение антенны в термоусадку для защиты.

Последний шаг — привязка приемника. Это можно сделать в любое время, однако некоторые приемники имеют специальную кнопку привязки, доступ к которой впоследствии может быть затруднен. Различные передатчики имеют разные методы привязки, однако все они обычно включают питание при нажатой кнопке, а сам передатчик находится в режиме привязки. Для получения подробной информации обратитесь к руководству по эксплуатации вашего передатчика!
Внимание! — Одним из самых важных шагов является настройка отказоустойчивости. Это позволит остановить полет дрона в случае отключения от пульта дистанционного управления и может предотвратить травмирование вас или других людей. Для разных комбинаций передатчика и приемника эти настройки могут быть разными.
Некоторые передатчики нужно настраивать больше, чем другие! В этом видео Джошуа Бардвелл настраивает все в своем специальном издании Taranis. Как настроить FrSky Taranis и конфигурацию Betaflight / Cleanflight
Шаг 12: Подключение контроллера полета
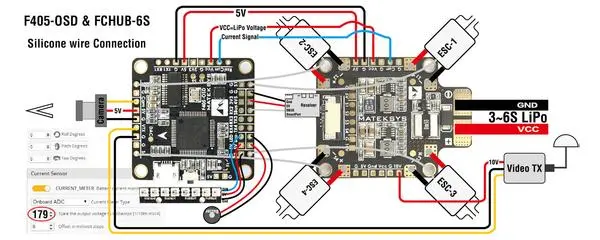
Последний компонент для монтажа — это полетный контроллер! Это мозг вашего дрона, и здесь мы будем подключать почти все сигнальные провода. Самое сложное в подключении полетного контроллера — это понять, что куда идет, поскольку все полетные контроллеры имеют немного разную схему. Первое, что я советую вам сделать, это найти схему распиновки вашей платы, она должна выглядеть примерно так:
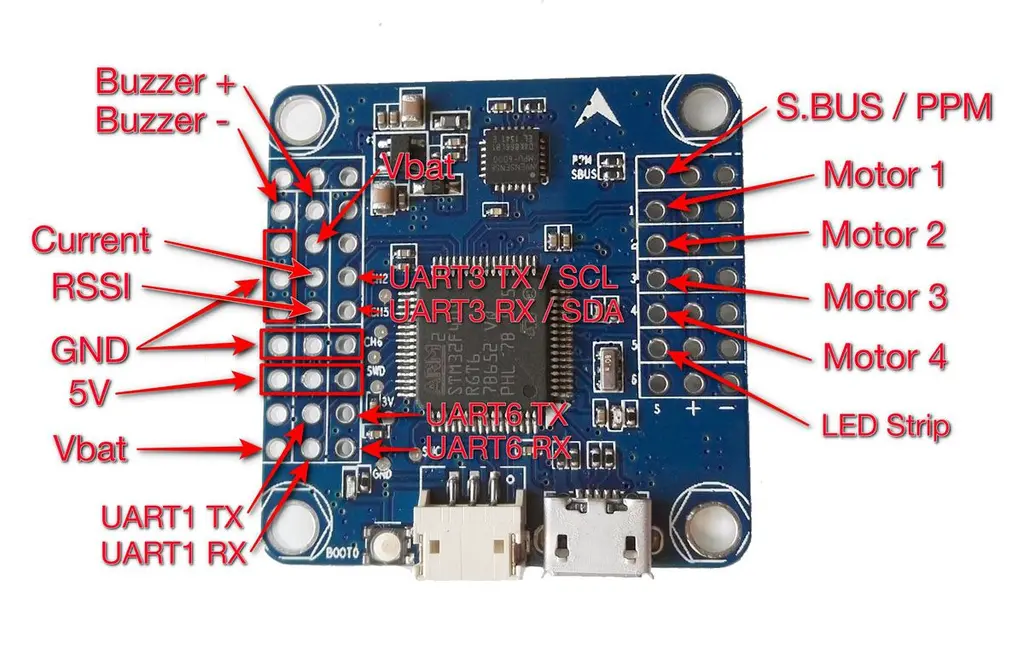
Некоторые производители, такие как Matek, даже начали предоставлять пользователям полные электрические схемы, как показано ниже. Это покажет вам, какие именно контакты нужно припаять, что значительно облегчит вам работу. Обратите внимание, что все красные и черные провода питания мы уже припаяли! Следующая схема предназначена для плат, которые я использую, однако она немного уникальна, так как есть ленточный кабель, соединяющий PDB с полетным контроллером.
Как правило, вам нужно подключить следующие провода к соответствующим колодкам:
Питание — Как и все остальные компоненты, мы должны обеспечить их питанием, почти все полетные контроллеры требуют 5 В, однако некоторые имеют собственный регулятор и работают от напряжения батареи. Для этого необходимо проверить, какой вход требуется вашему полетному контроллеру.
Vbat — Если ваш полетный контроллер работает от 5 В, ему все равно потребуется считывать напряжение основной батареи, если вы хотите использовать такие функции, как OSD или звуковой сигнал. Для этого часто используется положительный и отрицательный провод, подключаемый к колодкам Vbat и «земля».
Двигатели — Каждый из четырех двигателей будет иметь один сигнальный провод (обычно белый) и один круглый провод (черный). Порядок подключения указан на схеме расположения двигателей!
Приемник — У вас будет один сигнальный провод для подключения к порту UART RX или выделенному порту SBUS и т.д. У вас также может быть провод телеметрии, который будет подключен к другому UART TX!
OSD — Если у вас есть OSD, у вас есть разъемы для видеовхода и видеовыхода, а также основания для обоих сигналов. Важно, чтобы вы использовали эти основания для камеры и VTX, если вы хотите получить чистое видео.
Некоторые дополнительные услуги, которые вы можете включить, могут быть следующими
Зуммер — он служит для поиска потерянного дрона в случае аварии или для предупреждения о разрядке батареи. Контроллеры полета обычно имеют + и — зуммерную панель, которую можно использовать здесь.
Светодиоды — Вы можете установить на свой дрон всевозможные светодиоды со всевозможными рисунками, которые отлично подойдут для обозначения вашего дрона во время гонок. Светодиодные ленты обычно питаются от любых + и — 5 В колодок с сигнальным проводом, подключаемым к полетному контроллеру. Как и в случае с большинством компонентов, я бы рекомендовал питать светодиоды от PDB, если это возможно.
Прежде чем что-либо делать, продумайте свою сборку и спланируйте, что и куда вы хотите подключить. Затем вы можете начать отрезать провода нужной длины и проложить их под полетным контроллером. Когда вы будете удовлетворены, вы можете установить полетный контроллер на стек с помощью нейлоновых стоек, при этом убедитесь, что USB-порт находится с одной стороны для легкого доступа к нему в дальнейшем.
Совет — Вы можете использовать резиновые стойки или уплотнительные кольца для «мягкого крепления» вашего полетного контроллера! Это гасит некоторые вибрации, считываемые гироскопом, обеспечивая более плавный полет.
Вы могли заметить, что на дроне есть какая-то стрелка или шеврон, который используется для обозначения передней части дрона. К счастью, с помощью программного обеспечения можно настроить направление дрона, поэтому я бы рекомендовал установить плату под углом, который лучше всего подходит для вашей установки.
Вот изображение, показывающее мой полетный контроллер в полностью смонтированном виде. Обратите внимание, что USB находится сбоку, а все необходимые провода проложены под платой, где это возможно. Это сделано для того, чтобы защитить провода от вытягивания батарейным ремнем, который сидит близко на моей раме. Провода моего двигателя скрыты на этом снимке, но на самом деле они подключаются к PDB через ленточный кабель.

К этому времени вы уже должны быть хорошо знакомы с Джошуа Бардвеллом, и, конечно же, у него есть целая серия информативных видеороликов по подключению полетных контроллеров, которые вы должны обязательно посмотреть! Ваша схема, скорее всего, будет отличаться от моей, поэтому лучше всего научиться разбираться в распиновке и подключать любой полетный контроллер в соответствии с вашими требованиями. Проводка полетного контроллера для начинающих.
Шаг 13: Завершение сборки
Если вы дошли до этого момента, ПОЗДРАВЛЯЕМ! Вы проделали всю тяжелую работу и на 99% завершили сборку! Остались последние штрихи — такие мелочи, как завершение сборки рамы, термоусадка или изолента для дополнительных компонентов и установка крепления для камеры. В некоторых сборках вы можете отложить этот шаг до завершения настройки программного обеспечения, если доступ к некоторым компонентам затруднен.
Совет — Как и в случае со всеми остальными компонентами, воспользуйтесь возможностью использовать мультиметр и проверить наличие короткого замыкания перед подачей питания на полетный контроллер.
Внимание! Мы еще не готовы устанавливать стойки, мы хотим проверить, что все работает, на случай, если что-то пойдет не так. Стойки устанавливаются в последнюю очередь, при условии, что вы на 100% уверены во всем остальном.

Шаг 14: Конфигурация программного обеспечения
Конфигурация программного обеспечения — это огромная статья, в которой нужно разобраться в зависимости от ваших компонентов и предпочтений, которые будут отличаться почти для каждой сборки. Все, что я могу порекомендовать, это базовый контрольный список того, что нужно установить, пока мы не напишем полную статью. Убедитесь, что на вашем компьютере установлен программный конфигуратор, такой как Betaflight, и подключитесь к дрону через USB-кабель (возможно, вам потребуется установить соответствующие драйверы для вашего полетного контроллера).
- Прошивка прошивки — Подобно тому, как компьютер работает под управлением Windows, OSX или Linux, полетный контроллер работает под управлением различных версий программного обеспечения. При настройке нового полетного контроллера всегда лучше обновить его до последней версии выбранной вами прошивки. Это часто делается с главного экрана конфигуратора.
- Настройка периферийных устройств — Когда вы подключали наш полетный контроллер, вы могли подключать устройства к одному из UART-портов, ваш приемник будет подключен к одному из них, обозначенному как SBUS. Нам нужно настроить эти порты, чтобы сообщить полетному контроллеру, с чем он общается.
- Конфигурация дрона — мы хотим указать дрону, под каким углом установить полетный контроллер, какой приемник мы используем, как общаться с ESC и установить различные ограничения, такие как минимальный дроссель. Здесь есть много настроек, которые будут лучше объяснены в следующем видео.
- Настройте режимы полета — Эти режимы должны быть назначены на переключатели вашего передатчика. Для новичка я бы рекомендовал установить переключатель Arm, а затем отдельный переключатель для автоматического уровня и режима acro. Дополнительные переключатели можно использовать для таких функций, как звуковые сигналы.
- Установите тарифы — тарифы определяют, насколько чувствительны ваши стики передатчика, для новичка я бы рекомендовал оставить их по умолчанию и регулировать по мере роста вашей уверенности.
Конечно, я не мог упустить возможность поделиться с вами еще одним видео Джошуа Бардвелла! Здесь он запускает полную установку Betaflight, показывая вам каждый шаг, который вы можете сделать.
Шаг 15: Заключительный тест
Совет — Как и в случае с системой электропитания, используйте мультиметр, чтобы проверить надежность всех соединений и отсутствие короткого замыкания, прежде чем подавать питание!
Когда наше программное обеспечение настроено, мы готовы к финальному тестированию! Часы вашего времени привели к этому моменту, и легко начать волноваться.
Внимание! На этих тестах мы -начнем раскручивать двигатели, и может случиться всякое. Убедитесь, что на дроне ни при каких обстоятельствах нет пропеллеров!
Следующие вещи необходимо протестировать в конфигураторе:
Тест 1 — Ориентация полетного контроллера.
Нам нужно убедиться, что программное обеспечение знает, где находится передняя часть дрона, мы должны были настроить это раньше, но нужно убедиться, что все правильно. В конфигураторе вы должны увидеть 3D-модель дрона, когда вы наклоняете дрон, модель должна обновляться в режиме реального времени. Убедитесь, что она вращается в правильном направлении по крену, тангажу и рысканию.
Тест 2 — Каналы приемника
Нам нужно убедиться, что наш полетный контроллер правильно общается с приемником, для этого необходимо подключить аккумулятор. Когда дрон запитан, вы должны иметь возможность просматривать все входы стиков на вкладке приемника, проверяя при этом, что переключатели соответствуют запланированным режимам полета. Если все работает неправильно, это может быть связано с настройками вашего пульта.
Тест 3 — Вращение двигателя
Именно здесь ваш дрон начнет оживать! Установив батарею, перейдите на вкладку «Двигатели» и нажмите на поле, чтобы подтвердить, что вы сняли все пропеллеры! Каждый двигатель должен иметь ползунок, который теперь можно использовать для питания каждого двигателя.
Вы должны немного подвигать его по очереди, чтобы проверить, что для каждого канала вращается нужный двигатель и что двигатели вращаются в правильном направлении. Если они ведут себя неправильно, вам придется их поменять. Обратитесь к схеме расположения двигателей в вашем программном обеспечении, чтобы узнать правильный порядок.
Тест 4 — Постановка на охрану
Мы готовы проверить, что дрон держит руки и что вы можете управлять моторами с помощью пульта! Подключите батарею, включите передатчик и попробуйте щелкнуть переключателем манипулятора. Теперь вы можете попробовать подвигать стиками, и, надеюсь, двигатели начнут двигаться! Убедитесь, что переключатель снятия с охраны работает, так как он может понадобиться в экстренных случаях. Если вы не можете поставить свой дрон на охрану, вот некоторые из возможных причин.
Тест 5 — Безопасность при отказе
Теперь мы хотим проверить, что дрон отключится при потере радиосигнала. Если вы не настроите это правильно, вы рискуете либо улететь, либо повредить дрон, если пульт не будет включен. Для проверки защиты от сбоев поставьте дрон на охрану и увеличьте дроссельную заслонку. Когда двигатели начнут вращаться, выключите пульт и посмотрите, что произойдет. Мы надеемся, что дрон отключится в течение секунды.
Тест 6 — Все остальное!
Теперь, когда все важные вещи работают, вы можете проверить все остальное, например, экранное меню, звуковой сигнал или телеметрию, чтобы убедиться, что все работает на 100% перед первым полетом.
Тест 7 — Испытательный парящий
Если вы прошли через все эти испытания, значит, вы сделали это! Вы готовы к первому пробному полету! Теперь вы можете прикрепить пропеллеры и отправиться на открытое место, где нет других людей, чтобы проверить, летает ли он! Следует отметить, что пропеллеры бывают по часовой и против часовой стрелки.
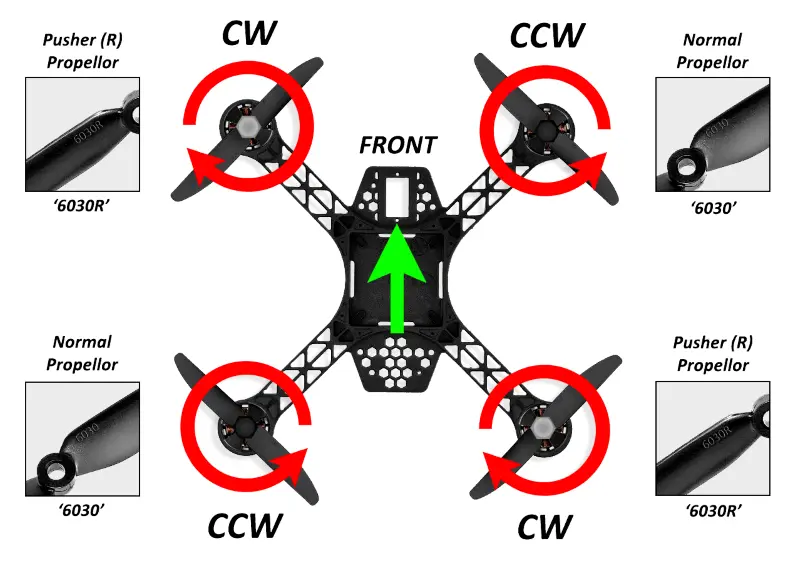
Прикрепляя их, убедитесь, что вы надели их правильно! Эта схема с сайта hobbyrc хорошо показывает это, убедитесь, что стойки надеты хорошо и плотно.
Поместите дрон подальше от себя, возьмите его на руки, плавно увеличьте дроссель и попытайтесь зависнуть в нескольких футах от земли. Будьте готовы снять с охраны или опустить дроссель, если он перевернется. Если что-то пойдет не так, обратитесь к этому видео: Квадрокоптер переворачивается при взлете: решено.
ПОЗДРАВЛЯЮ! — ВЫ СДЕЛАЛИ ЭТО!
Если вы дошли до этого момента и дочитали это подробное руководство «Как построить дрон», вы сделали это! Создание своего первого дрона — это большой подвиг, вам пришлось перелопатить горы информации и, вероятно, столкнуться с множеством трудностей на этом пути. Однако в результате вы получили дрон, созданный по вашим требованиям, которым вы можете гордиться. А если вдруг что-то пойдет не так или сломается, вы будете точно знать, как это исправить! Будьте осторожны в полетах и ухаживайте за ним, нет ничего хуже, чем видеть, как ваша гордость и радость разбивается на сотни мелких кусочков!
Спасибо, что остаетесь со мной, вы уже достаточно прочитали и, должно быть, взволнованы. Зарядите аккумуляторы и отправляйтесь в полет! Однако учтите, что строительство и полеты на дронах — хобби, которое вызывает привыкание, и вы всегда будете хотеть еще один! Надеюсь, скоро увидимся. Наслаждайтесь!